|
||||||||
|
 |
|||||||
 |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||
 |
|||||||||||||||||||||
| 日本人には身近な魚である「鯛」。その鯛が実物とそっくりの姿と動きで水の中を泳ぐ。推進、旋回、静止も自由に行い、ひれだけでなく目や口も動くので、思わず釣りたくなるほどだ。「仲間」にはエイやサメなども。 | |||||||||||||||||||||
|
|||||||||||||||||||||



 |
|||||||||||||||||||
| 1秒間に羽ばたく回数が少なく,比較的関節数が少ない蝶の飛翔。この「ひらひら」と飛ぶ動きは、ほかの昆虫にはない独特のものだという。そんな蝶のロボットは、大きく翅を上下させて「ひらひら」と宙を舞う。 | |||||||||||||||||||
|
|||||||||||||||||||



 |
|||||||||||||||||||||
| 「生きた化石」と呼ばれるシーラカンスがロボットで蘇った。特徴である「ひれ」も忠実に再現され、それらを使って水中も泳げる。水族館の「アクアマリンふくしま」(福島県いわき市)で子供たちに大人気だ。 | |||||||||||||||||||||
|
|||||||||||||||||||||



 |
|||||||||||||||||||||
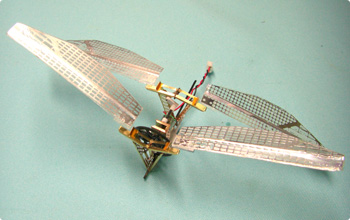
| 「鳥型羽ばたきラジコン」の開発にひとりで取り組む「自作工房」さん。「SmartBird」の動画を参考に「試作一号機」を完成させた後、独自の改良を加えた「試作二号機」ももうすぐ完成。この人はいったい何者? | |||||||||||||||||||||
|
|||||||||||||||||||||



 |
|||||||||||||||||||||
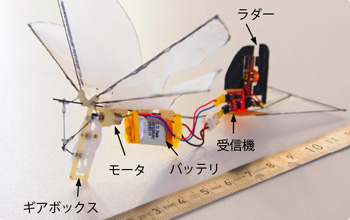
| 鳥の中でも最小の部類に入るハチドリ。この羽ばたき飛行ロボットは、超小型モーターとバッテリーを備え、前進だけでなく尾翼(ラダー)の角度を変えることでの旋回も可能。全長10cm、3gに満たない体で8の字飛行もこなす。 | |||||||||||||||||||||
|
|||||||||||||||||||||


 |
|||||||||||||||||||||
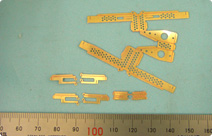
| バッテリーを積んで前進に飛翔し、旋回もできるトンボロボット。小型化にはマイクロ加工技術を用いた、折り紙構造による一体成形がポイントだ。研究室にはアリ型、アメンボ型、蝶型などもあり、昆虫型ロボットが盛りだくさんだ。 | |||||||||||||||||||||
|
|||||||||||||||||||||

 |
||||||||||||||||||||||||||
|
||||||||||||||||||||||||||


あなたを求める企業がある!
まずはリクナビNEXTの「スカウト」でチャンスを掴もう!
|
||||


このレポートを読んだあなたにオススメします
操縦できる「ガンダム」、人間そっくりのアンドロイド…
ヒューマノイドを開発せよ!電気エンジニアの意外力
エンジニアに人気の高いヒューマノイドロボット。ただ、残念ながら開発に携われる人は少数派だ。そこで今回は電気系エンジニア…

進む機構のシンプル化、広がる電気・ソフトでの制御…
今、機械系エンジニアに求められる「+α」の技術力
機械、機構、筐体などを設計するメカ系エンジニアに逆風が吹いている。製品の機構をシンプルにして部品数を減らし、回路やソフトで制御す…

第3世代「EV3」が新発売!プログラマのスキルアップにも!
増井雄一郎が熱中するレゴ マインドストームの魅力
レゴ社とMITが開発した「レゴ マインドストーム」。各種センサー、サーボモーター、CPU、パーツなどが揃ったロボット開…

「ななロボ2」を完成させよ!エンジニアが応援する!
SKE48・菅なな子はロボ女!なんなんの夢と野望
SKE48の菅なな子を知っているだろうか? ロボ女で、はんだこてが得意で、ダンスが上手で、剣道家で、そしてアイドル!!…

発見!日本を刺激する成長業界
低速EVが発進!コストダウンと法整備で普及を目指せ
![]() 人口の都市集中が進むにつれ、急速にクローズアップされている新マイクロカーLSV。そのEV版の開発が今、世界で加速して…
人口の都市集中が進むにつれ、急速にクローズアップされている新マイクロカーLSV。そのEV版の開発が今、世界で加速して…

広める?深める?…あなたが目指したいのはどっちだ
自分に合った「キャリアアップ」2つの登り方
「キャリアアップしたい」と考えるのは、ビジネスパーソンとして当然のこと。しかし、どんなふうにキャリアアップしたいのか、…

あなたのメッセージがTech総研に載るかも